

摘要:滑轨机器人移动原理基于精密的机械结构和先进的控制系统。机器人通过滑轨上的导轨进行移动,依靠电机驱动滚轮或履带实现位置变化。传感器和控制系统协同工作,确保机器人精确控制速度和方向。其核心技术包括路径规划、运动控制和传感器技术等。滑轨机器人移动原理保证了高效、精准的自动化操作,广泛应用于工业、医疗和军事等领域。
本文目录导读:
滑轨机器人是一种自动化机械设备,能够在特定的滑轨上移动并执行一系列任务,随着科技的快速发展,滑轨机器人在工业、物流、科研等领域的应用越来越广泛,本文将详细介绍滑轨机器人的移动原理,帮助读者更好地理解其工作原理。
滑轨机器人的基本构造
滑轨机器人主要由以下几个部分组成:
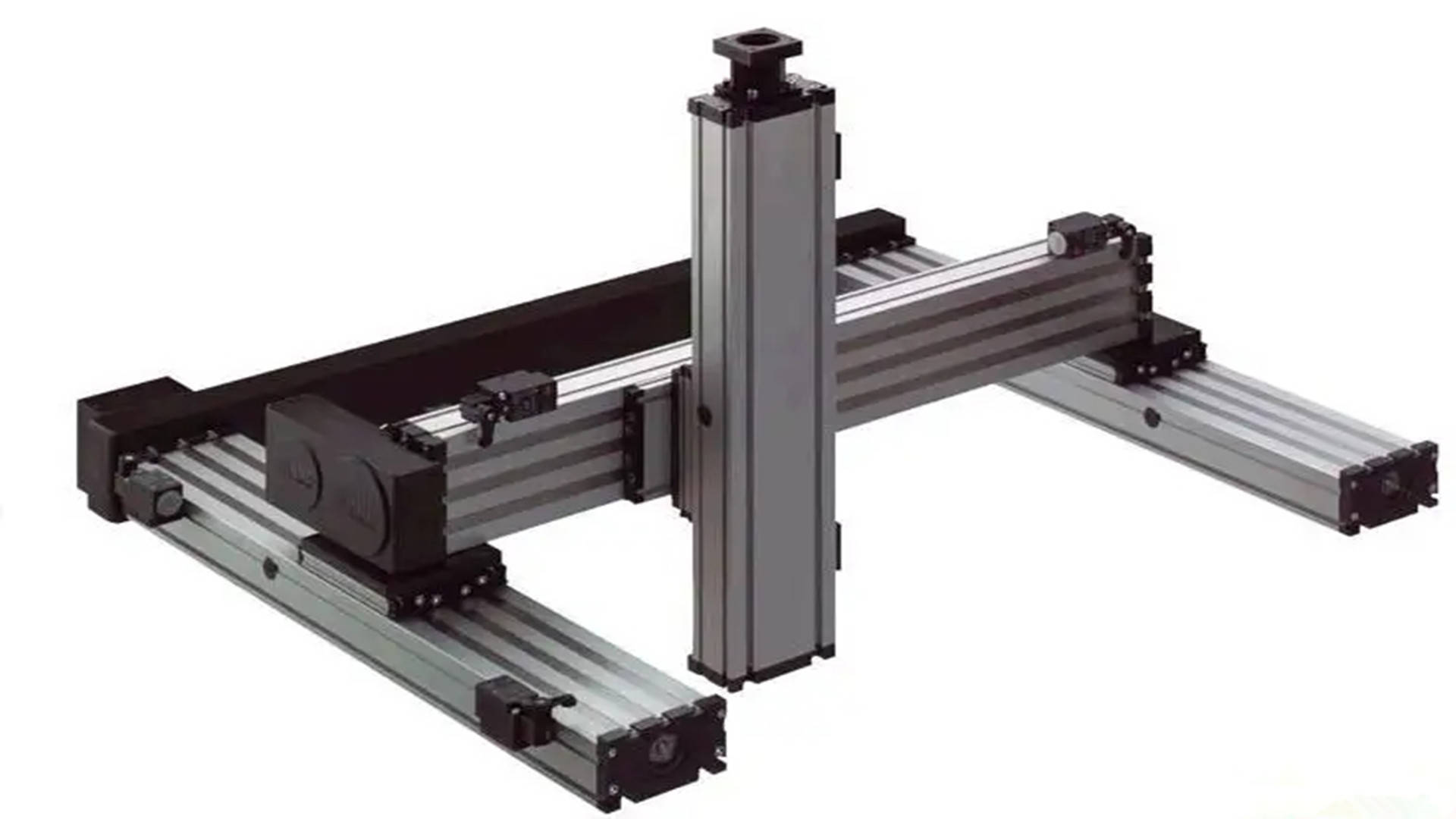
1、滑轨:滑轨是滑轨机器人的基础,机器人通过滑动部件在滑轨上移动,滑轨可以根据需求设计成直线、曲线或复杂路径。
2、机器人本体:机器人本体包括驱动装置、控制装置、执行装置等,驱动装置提供动力,使机器人在滑轨上移动;控制装置负责控制机器人的运动状态;执行装置完成指定的任务。
3、传感器与反馈系统:传感器用于检测机器人周围的环境和状态,反馈系统将这些信息传递给控制装置,以实现机器人的精准控制。
滑轨机器人的移动原理
滑轨机器人的移动原理主要涉及到以下几个方面:
1、驱动方式:滑轨机器人通常采用电动驱动方式,通过电机驱动滑动部件在滑轨上移动,有些高级滑轨机器人还采用液压或气动驱动方式,以实现更复杂的运动。
2、运动控制:运动控制是滑轨机器人移动的核心,通过控制装置发出指令,控制电机的工作状态,从而控制机器人在滑轨上的运动速度和方向。
3、路径规划:路径规划是滑轨机器人实现精准移动的关键,根据任务需求,提前规划好机器人在滑轨上的运动路径,机器人按照规划路径自动完成一系列动作。
4、传感器与反馈:传感器在滑轨机器人移动过程中起到关键作用,传感器实时检测机器人周围的环境和状态,反馈系统将这些信息传递给控制装置,使机器人能够根据实际情况调整运动状态,实现精准控制。
滑轨机器人的工作过程
滑轨机器人的工作过程可以简要概括为以下几个步骤:
1、初始化:启动滑轨机器人,初始化各项参数,包括机器人的位置、速度、方向等。
2、路径规划:根据任务需求,提前规划机器人在滑轨上的运动路径。
3、运动控制:控制装置根据规划路径和实时反馈信息,控制电机的工作状态,使机器人在滑轨上按照预定路径移动。
4、执行任务:机器人在移动过程中,根据任务需求执行一系列操作,如抓取、放置、检测等。
5、反馈与调整:传感器实时检测机器人周围的环境和状态,反馈信息给控制装置,使机器人能够根据实际情况调整运动状态和任务执行方式。
滑轨机器人的应用领域
滑轨机器人在工业、物流、科研等领域有广泛应用,具体应用场景包括:
1、工业领域:滑轨机器人可用于自动化生产线,完成零件的搬运、组装等任务。

2、物流领域:滑轨机器人可用于仓库管理、物品分拣、快递配送等。
3、科研领域:滑轨机器人可用于实验设备的自动控制,提高科研实验的效率和准确性。
本文详细介绍了滑轨机器人的移动原理,包括基本构造、驱动方式、运动控制、路径规划、传感器与反馈等方面,还介绍了滑轨机器人的工作过程和应用领域,希望通过本文的讲解,读者能够更好地理解滑轨机器人的工作原理,为今后的应用提供参考。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...